随着科学技术的发展,一些新型机械装备突破了外科医生的极限,其中包括像虫子一样的可以在内脏爬行的机器人胶囊、以组件形式进入人体内再进行组装的医学诊断机器人以及抽取患者血液样本的吸血机器人等。这些机器人技术代表了微创手术和远程医疗的前沿,有望在未来大幅提升诊疗效率和患者体验。

机器人护士
RI-MAN是一款医院原型搬运工,由日本名古屋RIKEN生物模仿控制研究中心成功研制。它的身高为158厘米,重量为100公斤,其手臂和躯干上安装的接触传感器能够产生感应,相应的指令可实现抬举搬运患者。从长远角度来看,它们可以接管取代对老年人或者体弱患者的搬运护理工作。这种机器人通过模仿人类运动,结合力传感器和智能控制算法,能够安全地转移患者,减少护理人员的体力负担。

可吞入体内的机器人
患者可以将装配结构管腔手术系统机器人(ARES)吞入口中,或者以片段的形式插入人体内,然后这些片段在人体内部进行组合。这种方法可使手术存在非常小的外部切口创伤。患者可以吞下15个以上的不同ARES组件,然后它们在伤患感染处集合,形成一个较大的可以执行手术的装置。这种模块化机器人通过磁力或机械锁定机制自组装,能够到达传统内镜难以触及的部位,进行精准治疗。
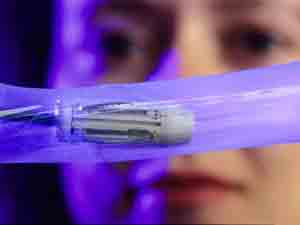
爬行照相机胶囊
这种奇特的机器人使用弹性松软的腿可以沿着患者的消化管道爬行,这种外形像胶囊的机器人携带着一个照相机,可对传统内镜检查手术进行观测。这种爬行照相机胶囊可用于检测人体咽喉、胃部和十二指肠是否有损害或者溃疡,它是由意大利比萨市圣安娜高等学校罪犯实验室研制的。其腿部采用柔性材料,通过微电机驱动,能够在湿润的消化道内壁附着并移动,提供更全面的视野。

机器人摄影师
在手术室外科医生也可不使用双手,只是移动自己的头部和两脚,便能实现观测控制。这款名叫拉帕罗斯科匹克照相机可用于微型扩散手术治疗(也称为“微型切口手术”)的观测分析。这意味着外科医生们能够在实际手术中解放出双手。该系统通过头部追踪和脚踏开关控制相机视角,使医生能专注于操作,提高手术精度。

前列腺机器人
前列腺机器人可让外科医生精确地切除前列腺增大的部分,而期间只需非常小的创口。之前外科医生详细测量出需要切除的前列腺部分,机器人会自动进行切除,而无需进一步的手术介入。这种机器人结合术前影像和术中导航,能够按照预定路径执行切割,减少对周围组织的损伤。

吸血机器人
吸血机器人的设计是用于血液抽样,它是由英国伦敦帝国理工学院的亚历克斯-泽范诺维西(Alex Zivanovic)和布赖恩-戴维斯(Brian Davies)设计的。该机器人利用微针和负压系统,能够自动定位静脉并抽取血液样本,减少患者疼痛和医护人员针刺风险。

游泳的照相机胶囊
由微型推进器作为驱动,这个照相机胶囊也是设计用于探索人体消化系统。当被这个胶囊放入患者口中之后,它将游至人体消化系统内部检测区域。其推进器采用仿生设计,如螺旋桨或摆动尾鳍,能够在液体环境中灵活移动,拍摄高分辨率图像。

结肠机械圆镜
使用一些夹子和混合剂可以将结肠机械圆镜沿着肠壁伸入其中,而不是像医生使用传统的方法将结肠圆镜挤压入人体肠道。由于这种方法对肠壁施加很少的压力,从而可以减缓患者的疼痛。这种机器人是科学家观察尺蠖后获得灵感设计的,通过交替夹持和伸缩实现前进,减少对肠壁的摩擦。

远程诊断机器人
目前医生和护士可以通过RP-7远程诊断机器人进行会诊,该机器人装配有照相机和屏幕,可使远程医生观看患者的病情状况,机器人可以连接听诊器、耳镜和超声波扫描器。它能使医生远程实现真实的医学诊断。这种机器人通过无线网络传输音视频和医疗数据,特别适用于偏远地区或传染病隔离场景。