脑机接口 美科学家发明蛇型机器人 废墟搜救将更方便
卡内基·梅隆大学的研究团队开发了一种新型蛇形机器人,旨在提高灾难救援效率。该机器人具备灵活的关节结构,能够在倒塌建筑物中穿行,携带摄像机和电子传感器,实时反馈幸存者位置。与传统救援方法相比,蛇形机器人显著缩短了接近灾难现场的时间,提升了救援安全性和效率。未来的研究将集中于进一步优化其灵活性和适用性,以应对日益增加的灾难需求。...
2006-04-15 10:14:14
228
0
卡内基·梅隆大学的研究团队开发了一种新型蛇形机器人,旨在提高灾难救援效率。该机器人具备灵活的关节结构,能够在倒塌建筑物中穿行,携带摄像机和电子传感器,实时反馈幸存者位置。与传统救援方法相比,蛇形机器人显著缩短了接近灾难现场的时间,提升了救援安全性和效率。未来的研究将集中于进一步优化其灵活性和适用性,以应对日益增加的灾难需求。...
研究者们开发的双腿机器人“跑步机器人”以每秒超过1米的速度行走,打破了现有纪录。该机器人高30厘米,采用简单的神经元控制程序,通过有限的传感器实现行走动作的自我调节。其运动机制依赖于脚接触地面与腿部摆动的反馈循环,展示了生物学系统建模在机器人设计中的优势。...
本文介绍了“数字人”技术的概念、发展历程及其在医学、航天、汽车工业等领域的广泛应用。重点阐述了我国“中国数字人男1号”数据集的领先优势,包括高分辨率切片、血管铸型技术等。文章还探讨了“数字人”从“可视人”到“智能人”的四个发展阶段,并指出我国目前仍处于“数字可视人”阶段,未来有望实现更高级的生理和智能模拟。...
Neuralink脑机接口通过皮层内电极阵列直接记录运动皮层神经元活动,利用无线传输与自适应算法将神经信号解码为精准动作输出。首位受试者展示了直觉式光标控制及多任务处理能力,达到每秒8比特速度。然而,电极丝回缩导致功能下降,需算法调整与创造性解决方案恢复性能。该技术为瘫痪患者提供高效人机交互,未来需优化电极稳定性以实现长期可靠性。...
英国团队开发植入微生物燃料电池的“肉食”机器人,通过摄入昆虫等生物实现自主能量补充。该系统利用微生物对有机物的厌氧分解产生电能,突破传统机器人对外部电源依赖。研究揭示微生物群落在生物质转化中的电化学机制,为自维持机器人提供新范式,潜在应用于生态监测与农业害虫控制。...
日本科学家成功组装首个分子机器复合体,实现了光致变构的分子钳。该研究展示了分子机器在纳米尺度下的运动和组合能力,为未来纳米机器人的开发提供了重要基础。通过紫外线和可见光的照射,分子机器的运动可以精准控制,实现了纳米级精度的旋转和收拢,为纳米技术的应用开辟了新方向。...
美国科学家首次将电脑技术应用于假肢制造,开发出电脑化假肢腿。该假肢通过芯片和电动马达控制步频步长,使截肢者行走更自然。目前正在临床试验,可连续行走12公里,若成功将在全美推广。...
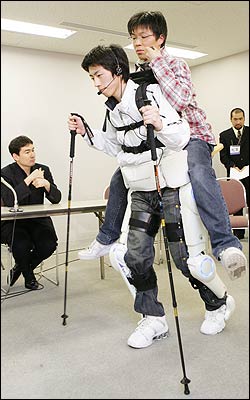
日本四肢瘫痪者内田靖史计划在登山家野口平的帮助下,穿着机器人服装HAL,登上瑞士阿尔卑斯山的最高峰。HAL是一种可穿戴的机器人外骨骼,可增强穿戴者的力量,帮助他们完成原本难以完成的任务。此次登山活动由'拥有梦想'组织发起,旨在帮助残疾人实现梦想,同时展示HAL的实用价值。...
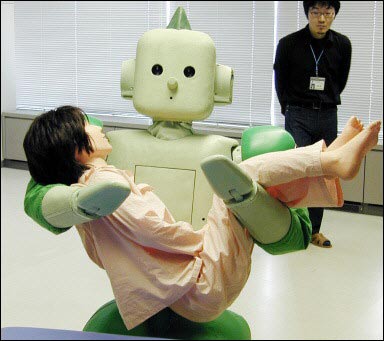
日本理化学研究所研发出名为RI-MAN的机器人,具有类似人类的视觉、听觉和嗅觉功能,用于帮助和照看老年人。该机器人可举起12公斤重物,识别气味和声音来源,并可通过自己的‘眼睛’看出人的相貌。研究人员计划在5年内进一步开发和完善其功能,包括举起70公斤重的人和判断人体健康状况。...
日本公司研制出全球首条机器鲤鱼,外形酷似普通鲤鱼,能够在水中游动、下潜和上浮。该机器鲤鱼由充电电池提供动力,电力支持大约1个小时。它的头部装有摄像头和传感器,用于水下环境调查和监控鱼类的生活环境。...
人脑极其复杂 拥有数以万亿计的连接 控制着您的...
在卡通反派中 忍者神龟的黏滑宿敌Krang是神经科...
当大众目光聚焦于ChatGPT Midjourney等通用模型时 一...
植入式脑机接口 BCI 虽能解码神经信号控制外部设...
一项最新研究对人工智能模拟人类认知的能力提...
一只数字果蝇在虚拟世界中行走 停下 用前足擦拭...